Prensîba xeta petrolê
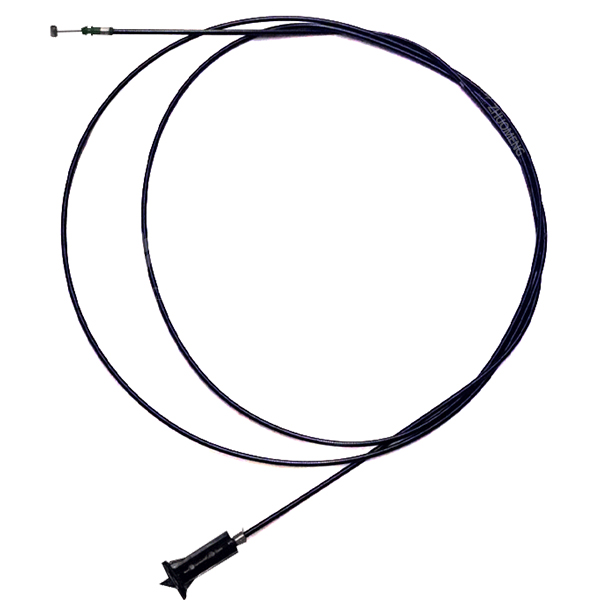
Gaza bi têla kişandinê ya kevneşopî bi pedala gazê ve bi rêya yek ji têlên pola û li aliyê din jî bi valva gazê ve girêdayî ye. Rêjeya veguhestina wê 1:1 e, ango em çiqas lingên xwe bikar tînin da ku li ser goşeya vekirina gazê gav bavêjin, lê di gelek rewşan de, divê valv bi goşeyek ewqas mezin venebe, ji ber vê yekê vê demsalê Goşeya vekirina valvê ne hewce ye ku ya herî zanistî be, her çend ev rêbaz pir rasterast be jî lê rastbûna kontrola wê pir xirab e. Gaza elektronîkî jî bi rêya kabloyê an têla têl ve tê kontrol kirin da ku vekirina gazê kontrol bike, ji rûyê erdê xeta gaza kevneşopî bi kabloyê were guhertin, lê di bingeh de ne tenê guhertinek hêsan a girêdanê ye, lê dikare fonksiyona kontrola otomatîkî ya tevahiya hêza derana wesayîtê bi dest bixe.
Dema ku şofêr hewce bike ku leza pedalê zêde bike, sensora pozîsyona pedalê dê sînyalê bi rêya kabloyê bigihîne ECUyê, ECU piştî analîzkirin, biryardan, û fermanek dide motora ajotinê, û motora ajotinê vekirina gazê kontrol dike, da ku herikîna tevliheviya şewitandinê rast bike, di barekî mezin de, vekirina gazê mezin be, tevliheviya şewitandinê bêtir dikeve silindirê. Ger gaza kişandinê tenê bi lingê ve girêdayî be da ku kûrahiya pedala gazê bipêçe da ku vekirina gazê kontrol bike, dijwar e ku goşeya vekirina gazê were sererast kirin da ku bigihîje rewşa rêjeya hewa-sotemeniyê ya teorîk, û gaza elektronîkî dikare bi rêya sensora ECUyê daneyên ku ji bo analîzkirin, berhevdan, û talîmatan ji bo çalakiya aktûatora gazê têne berhev kirin, gazê bixe pozîsyona çêtirîn, da ku bar û şert û mercên xebatê yên cûda bi dest bixe, dikare nêzîkî rêjeya hewa-sotemeniyê ya teorîk a 14.7:1 be, da ku sotemenî bi tevahî were şewitandin.
Sîstema kontrola gazê ya elektronîkî bi giranî ji pedala gazê, sensora cîguhestina pedalê, ECU (yekîneya kontrola elektronîkî), otobusa daneyan, motora servo û aktûatora gazê pêk tê. Sensora cîguhestinê di hundurê pedala gazê de tê sazkirin da ku di her kêliyê de pozîsyona pedala gazê bişopîne. Dema ku guherîna bilindahiya pedala gazê were tespît kirin, agahî dê tavilê ji ECU re were şandin. ECU dê agahî û agahiyên daneyan ji pergalên din hesab bike, û sînyalek kontrolê hesab bike, ku dê bi rêya xetê ji relaya motora servo re were şandin. Motora servo aktûatora gazê dimeşîne, û otobusa daneyan berpirsiyarê ragihandina di navbera ECUya pergalê û ECUyên din de ye. Ji ber ku gaz bi rêya ECUyê tê verast kirin, pergalên gazê yên elektronîkî dikarin bi taybetmendiyên cûrbecûr werin mîheng kirin da ku ewlehî û rehetiya ajotinê baştir bikin, yên herî gelemperî ASR (kontrola kişandinê) û kontrola leza (kontrola seferê) ne.